Chaotic Mobility Models¶
In several mobility models, random processes are used to propose a non predictable behaviour. I propose to use chaotic systems to have both unpredictable trajectory and also moving patterns related to the chaotic dynamic.
Chaotic walk¶
Introduced by Iba & Shimonshi [IBA11], the authors name it chaotic walk because it only uses the logistic map

to determine the next angular direction  of an entity.
of an entity.
The logistic permits to obtain values ![x_n\in [0:1]](_images/math/25b867c186557f2dacdb7b1d0bf30a40c51abcf9.png) . An entity move with
a constant speed.
. An entity move with
a constant speed.
With  , the values obtained by the logistic map are not well
distributed over the interval
, the values obtained by the logistic map are not well
distributed over the interval ![[0:1]](_images/math/25b8ac74084acbc7c7e3c153d9c6edfb04c3ac56.png) and most of them are closed to the
boundary. If we choose to build a mobility model, the logistic move, where
the next position doesn’t depends on the previous one and only depends on the
logistic map value, it leads to a mobility models oriented in one direction
with variations: from the left to the right.
and most of them are closed to the
boundary. If we choose to build a mobility model, the logistic move, where
the next position doesn’t depends on the previous one and only depends on the
logistic map value, it leads to a mobility models oriented in one direction
with variations: from the left to the right.
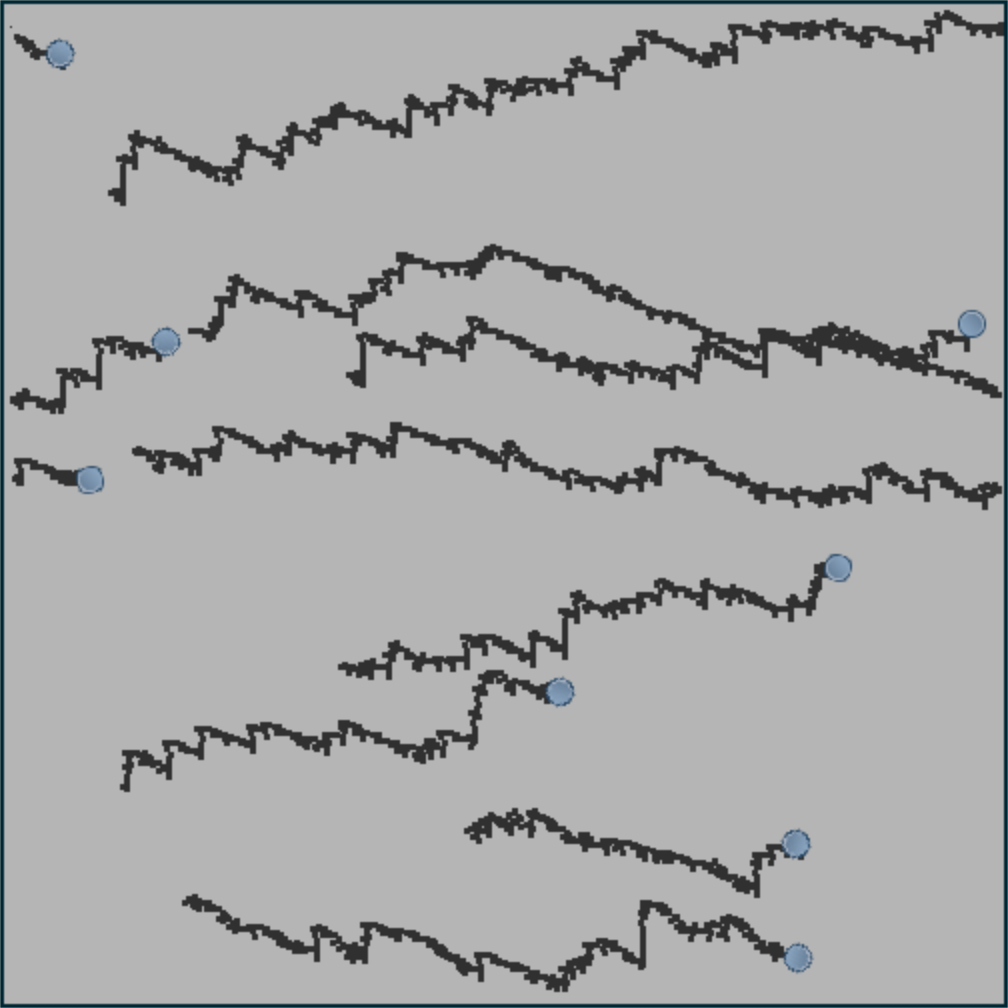
Fig. 1 - Eight agents performing the logistic move: they move mainly from left to right [1].¶
Let’s now consider the model proposed by [IBA11], the next angle is the sum of
the previous one with the next one computed from the logistic map. Also, the
authors use the parameter  as the number of decimal of the value
as the number of decimal of the value
 in the map.
in the map.
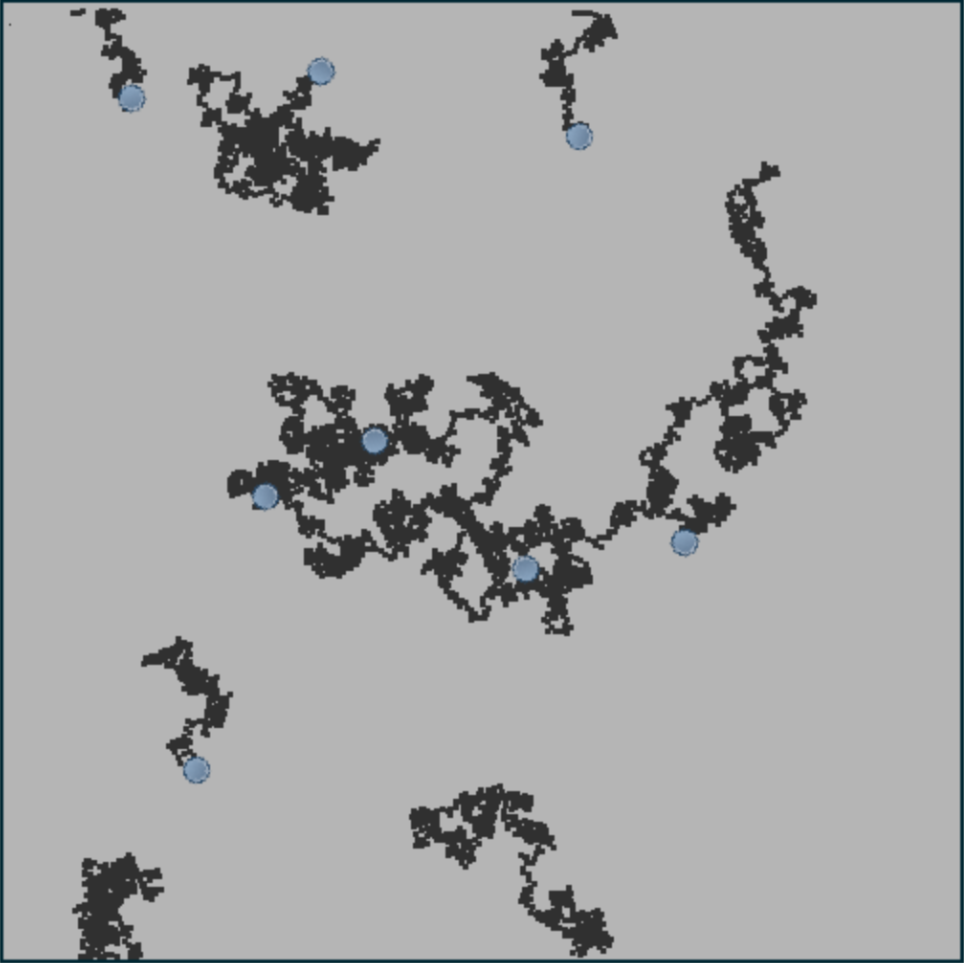
Fig. 2 - Eight agents performing the chaotic walk [IBA11] ( &  ) [1].¶
) [1].¶
Mobility model based on the Rössler system¶
Our work is based on the work of Kuiper & Nadjm-Tehrani [KUI06] where repulsive pheromones are used to cover an area in a Ant Colony Optimization method. The purpose of the CACOC mobility model (Chaotic Ant Colony Optimization to Coverage) is to combine a Ant Colony Optimization algorithm with chaotic dynamics [ROS18]. This have been performed using the Rössler system and it first return map to replace the random part dedicated to the exploration process.
Collision avoidance for CACOC¶
This work [DEN18] is extending CACOC by a Collision Avoidance (CA) mechanism and testing its efficiency in terms of area coverage by the UAV swarm. For this purpose, CACOC is used to compute UAV target waypoints which are tracked by model predictively controlled UAVs. The UAVs are represented by realistic motion models within the virtual robot experimentation platform (V-Rep). This environment is used to evaluate the performance of the proposed CACOC with CA algorithm in an area exploration scenario with 3 UAVs. Finally, its performance is analyzed using metrics.
References
T Iba & K Shimonishi, The Origin of Diversity: Thinking with Chaotic Walk, Unifying Themes in Complex Systems, 8, 447–461, 2011.
M. Rosalie, G. Danoy, S. Chaumette & P. Bouvry, Chaos-enhanced mobility models for multilevel swarms of UAVs, Swarm and Evolutionary Computation, 2018.
E. Kuiper and S. Nadjm-Tehrani, Mobility Models for UAV Group Reconnaissance Applications, In Proc. of IEEE International Conference on Wireless and Mobile Communications (ICWMC), 2006
J. E. Dentler, M. Rosalie, G. Danoy, P. Bouvry, S. Kannan, M. A. Olivares-Mendez & H. Voos Collision avoidance effects on the mobility of a UAV swarm using Chaotic Ant Colony with Model Predictive Control Journal of Intelligent & Robotic Systems, 2018.
Footnotes